

Hello, I want to do something pretty simple: rotate a rigid body given 3 user provided angles (roll pitch, yaw).
Currently, I have a Qt window and a visualization side by side.
Desired behavior: The user enters the yaw in the Qt window, rigid body yaws. User enters roll, rigid body rolls, etc.
Current behavior: no communication between the Qt window and the visualization thread: user enters a value in the Qt window, and nothing happens.
Can someone tell me how to update the visualization with values gotten from the PyQt thread?
Note: the below code block doesn't work.
Thank you
from klampt import *
import sys
from PyQt5.QtWidgets import QApplication, QMainWindow, QVBoxLayout, QHBoxLayout, QLineEdit, QPushButton, QLabel
from PyQt5.QtWidgets import QWidget, QSplitter, QFrame
from numpy import cos, arccos, sin, arcsin, tan, arctan, deg2rad, radians
class RotationWindow(QMainWindow):
def __init__(self, klamptGLWindow, world):
super().__init__()
self.world = world
self.sim = Simulator(self.world)
self.splitter = QSplitter()
self.left = QFrame()
self.leftLayout = QVBoxLayout()
self.initLeftLayout()
self.left.setLayout(self.leftLayout)
self.right = QFrame()
self.rightLayout = QVBoxLayout()
self.right.setLayout(self.rightLayout)
self.glwidget = klamptGLWindow
self.glwidget.setParent(self.right)
self.rightLayout.addWidget(self.glwidget)
self.splitter.addWidget(self.left)
self.splitter.addWidget(self.right)
self.splitter.setHandleWidth(7)
self.setCentralWidget(self.splitter)
def initLeftLayout(self):
# central_widget = QWidget(self)
# self.setCentralWidget(central_widget)
# self.leftLayout = QVBoxLayout(central_widget)
# QLineEdit fields and corresponding labels
self.roll_lineedit, self.roll_label = self.create_labeled_lineedit("Roll")
self.pitch_lineedit, self.pitch_label = self.create_labeled_lineedit("Pitch")
self.yaw_lineedit, self.yaw_label = self.create_labeled_lineedit("Yaw")
# Connect textChanged signals to callback methods
self.roll_lineedit.textChanged.connect(self.on_roll_text_changed)
self.pitch_lineedit.textChanged.connect(self.on_pitch_text_changed)
self.yaw_lineedit.textChanged.connect(self.on_yaw_text_changed)
# QHBoxLayout for each row (label + line edit + button)
self.roll_layout = self.create_row_layout("Apply Roll Rotation", self.roll_label, self.roll_lineedit, self.applyRollRotation)
self.pitch_layout = self.create_row_layout("Apply Pitch Rotation", self.pitch_label, self.pitch_lineedit, self.applyPitchRotation)
self.yaw_layout = self.create_row_layout("Apply Yaw Rotation", self.yaw_label, self.yaw_lineedit, self.applyYawRotation)
# Adding layouts to the main ayout
self.leftLayout.addLayout(self.roll_layout)
self.leftLayout.addLayout(self.pitch_layout)
self.leftLayout.addLayout(self.yaw_layout)
self.setWindowTitle('Rotation Window')
self.show()
def create_labeled_lineedit(self, label_text):
label = QLabel(label_text)
line_edit = QLineEdit(self)
return line_edit, label
def create_row_layout(self, button_text, label, line_edit, pureRotation):
row_layout = QHBoxLayout()
# QLabel
row_layout.addWidget(label)
# QLineEdit
row_layout.addWidget(line_edit)
# QPushButton
button = QPushButton(button_text, self)
button.clicked.connect(lambda _, le=line_edit: pureRotation(le))
row_layout.addWidget(button)
return row_layout
def applyRollRotation(self, line_edit):
theta = float(line_edit.text())
print(f"Applying Roll of {theta} degrees")
M1 = [1, 0, 0 ,
0, cos(theta), sin(theta),
0, sin(theta), cos(theta)]
self.world.rigidObject(0).setTransform(M1, [0,0,0])
sim.simulate(0.01)
self.sim.updateWorld()
def applyPitchRotation(self, line_edit):
theta = float(line_edit.text())
print(f"Applying Pitch of {theta} degrees")
M2 = [cos(theta), 0, -sin(theta) ,
0, 1, 0,
sin(theta), 0, cos(theta)]
self.world.rigidObject(0).setTransform(M2, [0,0,0])
sim.simulate(0.01)
self.sim.updateWorld()
def applyYawRotation(self, line_edit):
theta = float(line_edit.text())
print(f"Applying Yaw Rotation of {theta} degrees")
M3 = [cos(theta), sin(theta), 0,
-sin(theta), cos(theta), 0,
0, 0, 1]
self.world.rigidObject(0).setTransform(M3, [0,0,0])
sim.simulate(0.01)
self.sim.updateWorld()
def on_roll_text_changed(self, text):
print(f"Roll: {text}")
def on_pitch_text_changed(self, text):
print(f"Pitch: {text}")
def on_yaw_text_changed(self, text):
print(f"Yaw: {text}")
if __name__ == '__main__':
app = QApplication(sys.argv)
window = RotationWindow()
sys.exit(app.exec_())#!/usr/bin/python3
from klampt import *
from klampt.model.trajectory import RobotTrajectory
import time
import os
KLAMPT_ROOT = f"{os.getcwd()}" #root contains the data directory
KLAMPT_WS = f"{KLAMPT_ROOT}/Python3"
from numpy import cos, arccos, sin, arcsin, tan, arctan, deg2rad, radians
import QtMainWindowForRPYRotation as QtRotationWindow
def makefunc(gl_backend):
global g_mainwindow
g_mainwindow = QtRotationWindow.RotationWindow(gl_backend)
return g_mainwindow
if __name__ == "__main__":
#some Klamp't code
w = WorldModel()
ss = w.loadRigidObject(f"{KLAMPT_WS}/RahelsPrograms/spaceShuttle.stl") #return a RigidObjectModel
if ss == None:
print("loading spaceShip.stl failed ")
else:
vis.customUI(makefunc)
vis.add("world",w)
vis.add("ss", ss)
vis.edit("ss")
# from klampt import Simulator
# sim = Simulator(w)
# def setup():
# vis.show()
# def callback():
# ss = sim.body(w.rigidObject(0))
# '''
# by default, the simulator controls the world dynamics.
# to control the dynamics ourselves, we need to disable
# the simulator from doing so.
# '''
# ss.enableDynamics(False)
# ''' we need to set the velocity inside the loop,
# not just in setup().
# if the velocity (or other dynamics) are not controlled
# this causes a runtime error that the Rigid object energy
# exceeds the maximum energy threshold.
# here, the velocity is controlled manually but
# it can be controlled via PIDs '''
# # ss.setVelocity([0,0,0.000],[0.000,0,0])
# # sim.simulate(0.01)
# # sim.updateWorld()
# theta = radians(30)
# R3 = [cos(theta), sin(theta), 0,\
# -sin(theta), cos(theta), 0,\
# 0 ,0 , 1]
# translation = [0,0,0]
# w.rigidObject(0).setTransform(R3, translation)
#vis.loop(setup=setup,callback=callback)
vis.loop()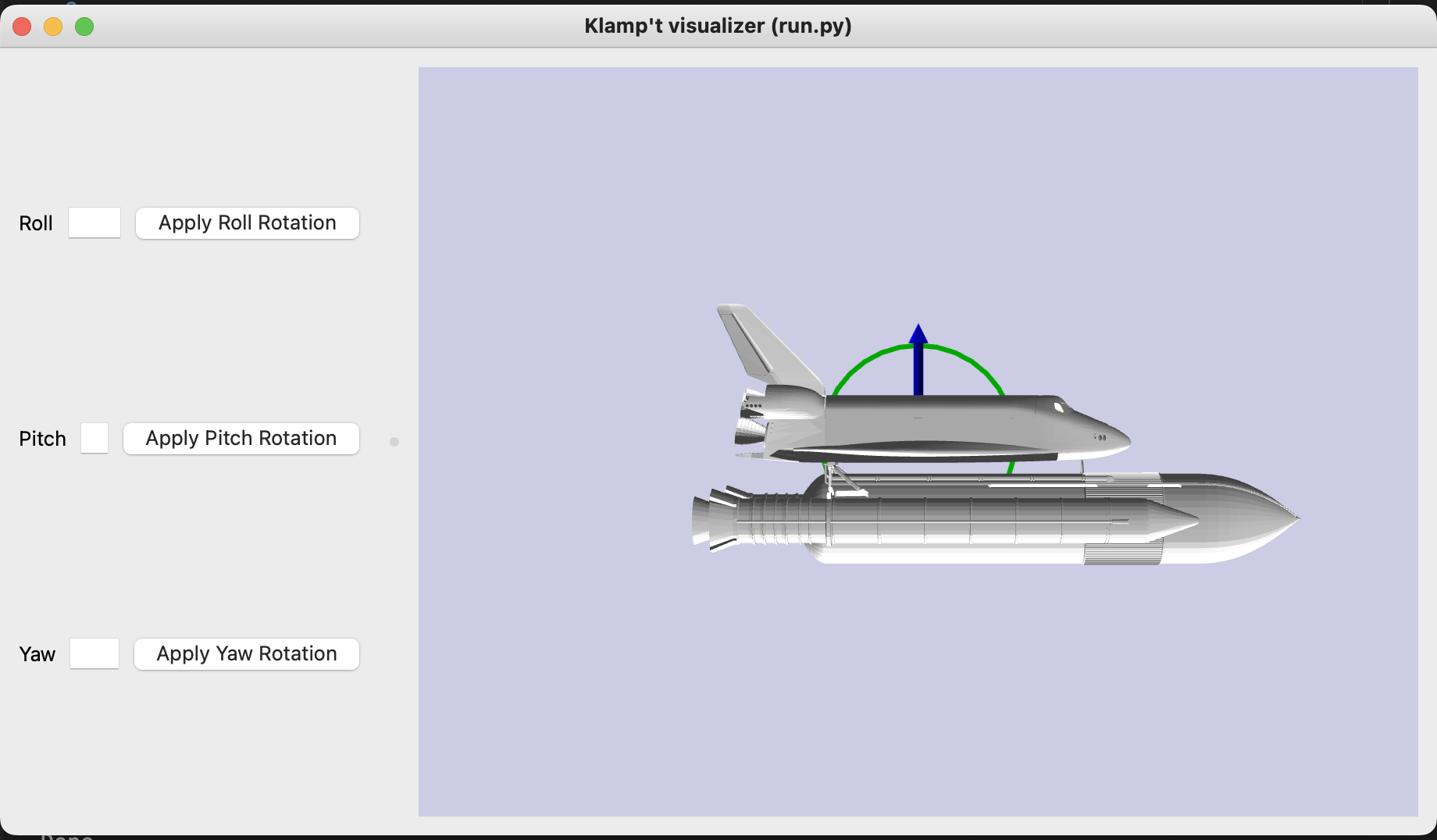
- replies 0
- views 537
- likes 0
-