

I did the feasibility check for start and goal configurations:
print("--------space.feasible(qstart)-----------")
print(space.feasible(qstart))
print("--------space.feasible(qgoal)-----------")
print(space.feasible(qgoal))
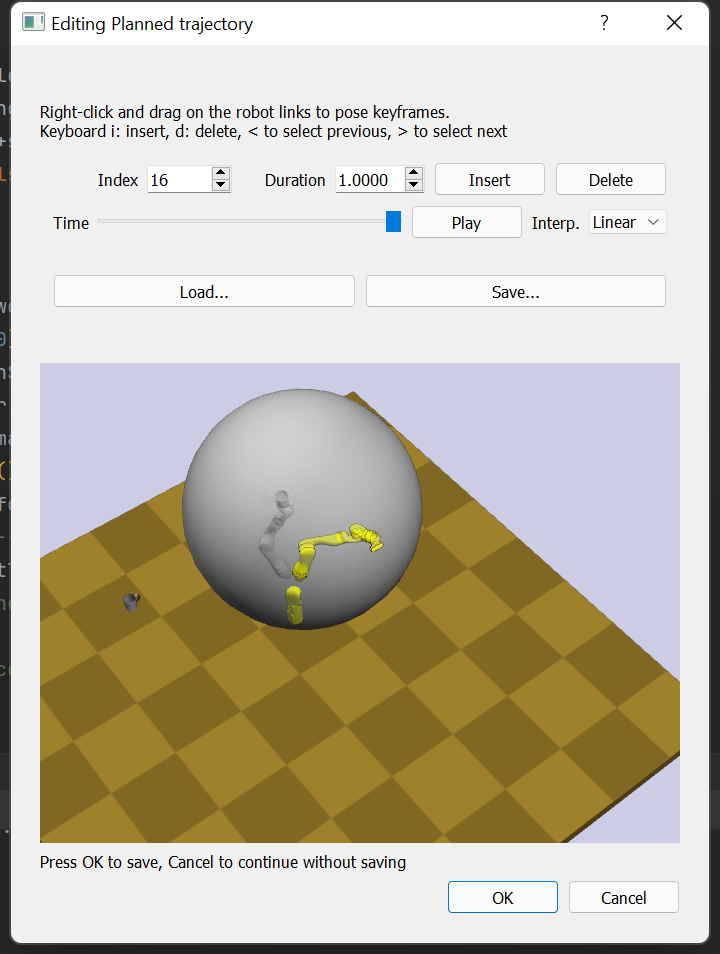
Both return True. However, it should return False. As the attached screenshot shows the sphere colliding with the robot. Is that a bug?
- replies 0
- views 1.2K
- likes 0
-