

Hi Prof. Hauser,
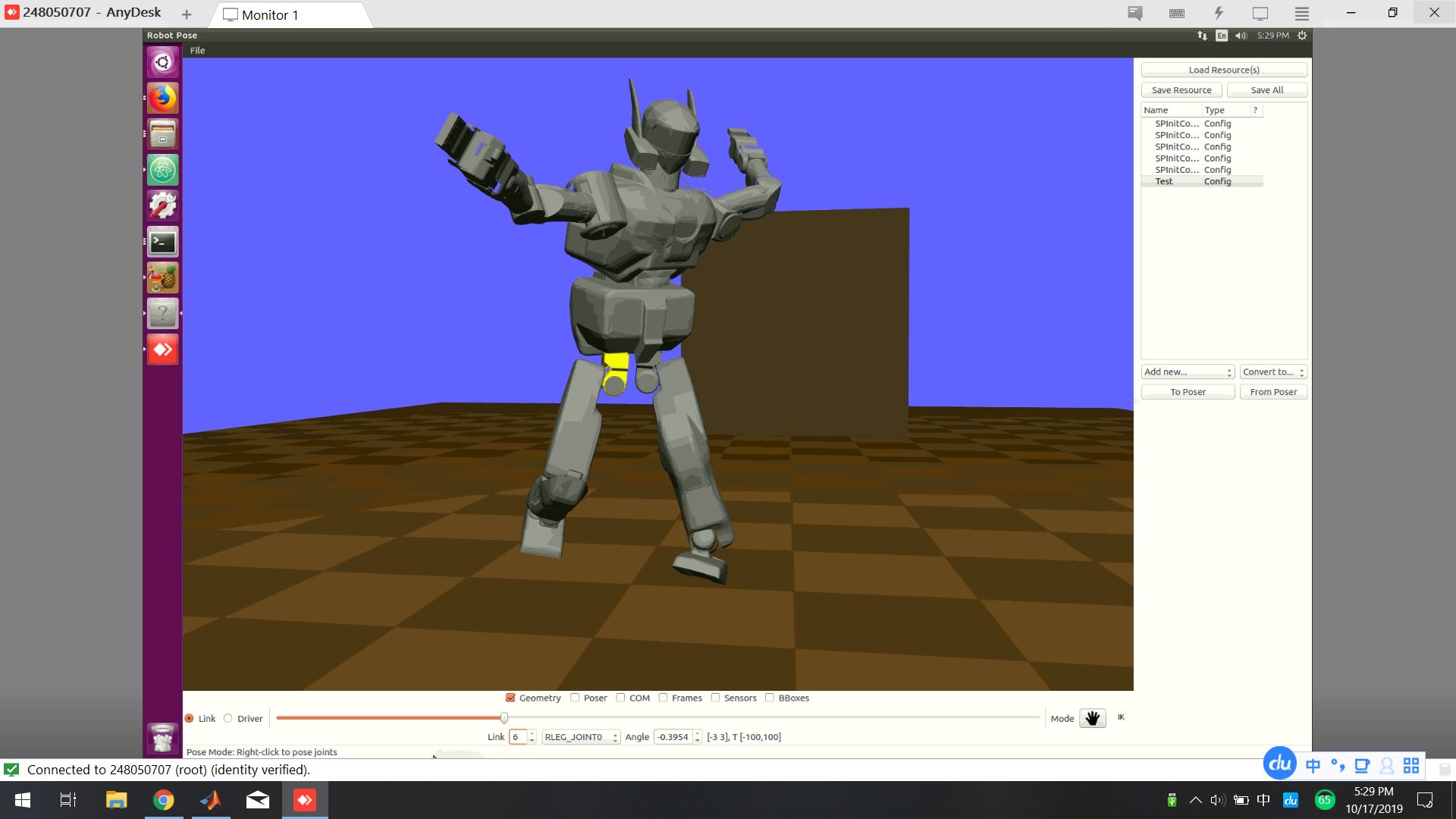
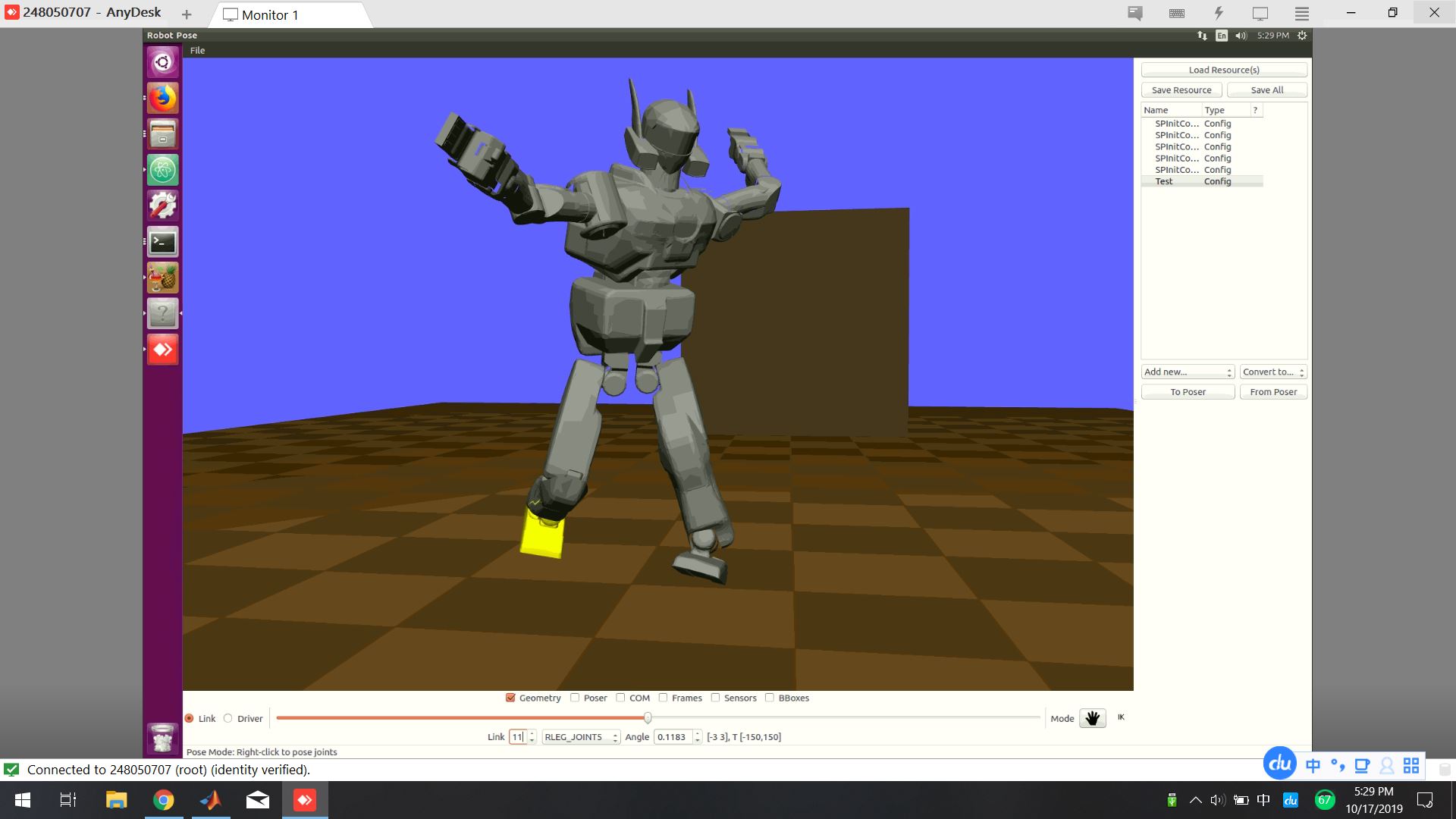
I am currently using void GetSelfCollisionPairs(Array2D & collision) and virtual bool SelfCollision(Real distance=0) to detect selfCollision for a given robot model in c++ environment. However, it seems to me that the results given to me from these two functions are not correct. For example, I have the robot's configuration set to be 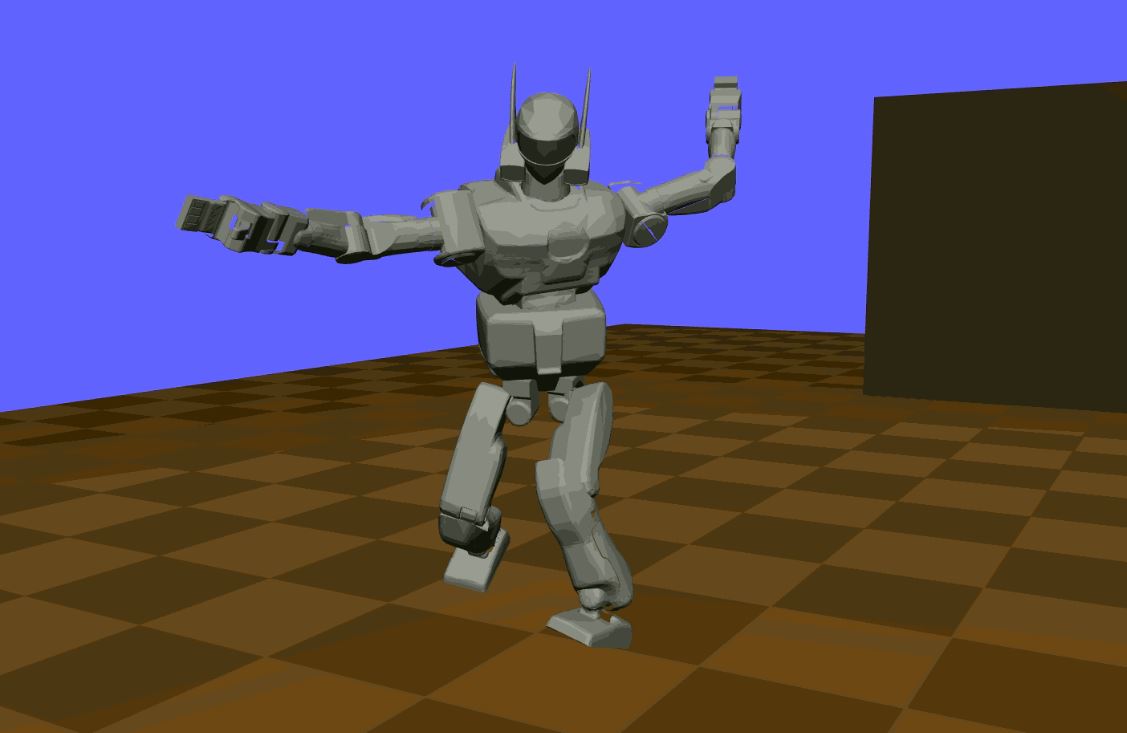
Obviously, self-collision should not be reported. However, virtual bool SelfCollision(Real distance=0) indicates the robot is in self-collision and from the collision list provided from void GetSelfCollisionPairs(Array2D & collision) , links not in collision are said to be in collision for example, these two links are said to be in collision.
So are there some prerequiste functions that should be called in advance to properly enable self-collision detection?
- replies 1
- views 3K
- likes 0
-